Center of gravity
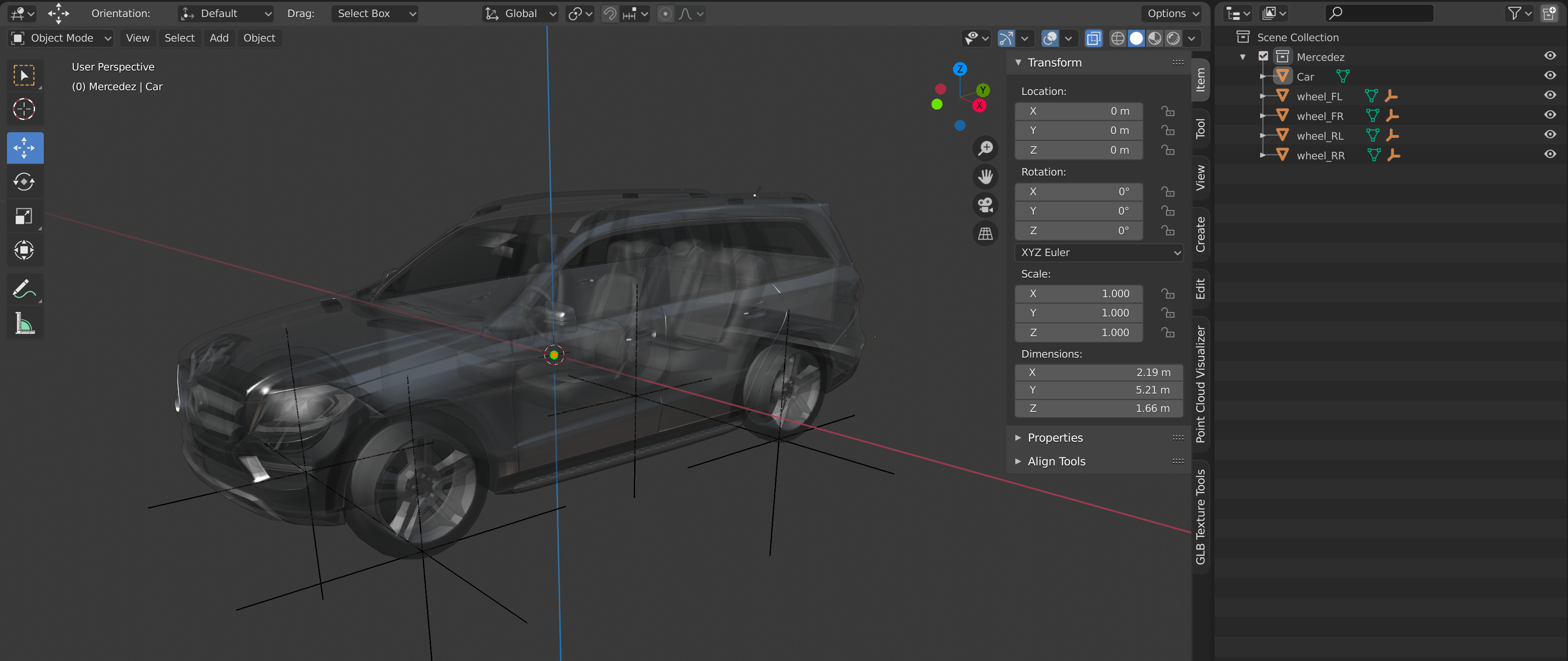
COG = X from bumper and Y from the ground. then match it with the center of the world, and apply all transforms from objects. all attributes should be in 0s.
Now with everything in place, set the collection.
- Mercedez
- Body
- Wheel_FR
- Wheel_FL
- Wheel_RR
- Wheel_RLFor each wheel
- Set origin / center of mass
- Create a locator, snap to selected wheel
- Drag to floor
- Parent locators to wheels